圈 | 进“自动驾驶微信群”,请加微ai-qicheren,备注:自动驾驶
圈 | 进“新能源汽车微信群”,请加微ai-qicheren,备注:新能源汽车
来源:汽车商业评论


自动驾驶做了已经很多年,最近几年又有大量的资金和团队投入这个领域,但大家发现很多自动驾驶技术在演示时效果很好,却很难做到大规模量产。
那么制约量产的核心问题在什么地方?如何解决?
在刚刚举办的2019世界智能网联汽车大会上,有不少企业提出了自己的解决方案,下面我们看看国内影响力比较大的两家企业——百度和阿里巴巴是怎么做的。
百度的量产探索:
高精地图和自主泊车
百度自动驾驶首席架构师郭阳在演讲中谈到,百度认为自动驾驶量产应该从比较合适的场景做起,而不是上来就做功能全面的汽车。
做出来的自动驾驶产品功能要符合汽车业界的规范和规律,量产最大的两个障碍,一个是安全,一个是车规。
百度在量产方面的探索,主要集中在高精地图和自主泊车Valet Parking上。
百度认为高精地图作为自动驾驶中的严重依赖项,对于自动驾驶的安全非常重要。

而高精地图只把数据采集出来是远远不够的,而是要做到实时更新。百度把更新的重任放在了众包上,利用行车记录仪采集的视频数据和采集好的高精地图进行匹配、还原建模,把数据以厘米级的精度更新在高精地图上。
这个更新过程是实时的,只要第一辆车(只要有前摄像头即可)看到路况的变化,把数据回传,后面的自动驾驶车辆马上可以获得信息。
另外,现在的高精地图很难说经过了什么安全测试,安全达到什么水平,所以今年百度和汽车行业嵌入式和互联软件产品全球供应商Elektrobit(EB)一起,做了高精地图安全白皮书——《安全可靠的自动驾驶地图》,集成了ISO 26262、SOTIF 、Safety in use等安全分析方法以及地图质量相关标准。
百度的高精地图遵循这些标准进行生产,以保证自动驾驶车辆使用高精地图时的安全。
高精地图的研发在中国还要符合国情,得到政策的支持,百度获得了第一个高精地图审图号,百度的高精地图从政策上、法规上,在敏感信息方面也是安全的。
郭阳表示,百度已经在国内OEM厂商中拿到了最大的订单量,希望能把高精地图尽快应用到更多场景中去,能为使用自动驾驶的公司提供最好的高精地图解决方案。
在自主泊车Valet Parking方面,百度认为完全无人的自主泊车是自动驾驶在乘用车领域落地最快的场景,因为环境稳定,速度较低,所以对算力的需求、对传感器的需求及对境总结的需求会得到缩减,可以把真正无人驾驶功能用在产品的设计上。
而自主泊车实际上有很大的用户需求,比如在北上广深这些大城市中,车位非常紧张,但在一些区域车位并没有得到充分利用,比如机场的停车楼有的区域拥挤,有的区域空闲,自主泊车就可以让这些社会资源得到有效利用。
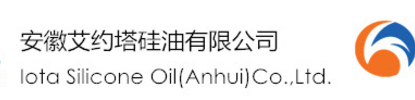
自动驾驶的Demo往往是在算力十分充沛、没有功耗限制的环境下完成的,到了车上,算力就要受到限制,即使目前最好的特斯拉FSD3.0芯片,算力只有70TOPS左右,和计算机完全没法比,同时算力的提高也会带来功耗的提高,风冷甚至水冷都不能解决散热问题。
百度花了两年时间,按照业界规范设计出了一个真正可以上车,解决实际运算需求的硬件,符合车规级要求,里面有等级非常高的安全芯片,可以真正布署到汽车上,满足普通消费者自主泊车需求。
同时,百度还对算法进行了深度优化,可以真正在车上跑起来,在并行计算、神经网络上进行了探索,把百度自己的开源神经网络移植到硬件上,实现了很好的配合,让算力超越了原有的硬件限制。

阿里巴巴专注物流车的无人化
在自动驾驶领域,阿里巴巴的做法和跟百度不太一样,阿里巴巴达摩院自动驾驶实验室负责人王刚在演讲中介绍,从一开始阿里巴巴关注的就是物流行业的自动驾驶。
阿里巴巴为什么要选择这个方向?一方面,阿里巴巴以天猫、淘宝为代表的电商平台,包括饿了么、盒马代表的本地生活平台,将会产生越来越多的包裹。另一方面,社会的老龄化越来越严重,在可以预见的未来,社会将会缺乏足够的劳动力去运输这些包裹。
因此,阿里相信物流车的无人化是整个物流产业发展的必然选择,也是社会发展的必然选择。
阿里巴巴目前专注于两个物流场景:第一是末端物流场景,最后1~3公里的问题。这应该是未来几年内最容易实现落地的场景,其在安全、法律上的挑战都相对少一些。第二是公开道路的技术研发,阿里巴巴已经开始在杭州闹市街头进行常态化路测以及相应的研发工作。
目前,阿里的无人车不仅可以应对各种复杂的开放道路路况,包括转弯、与非机动车辆以及行人的交互,还能在复杂的城市道路实现上千公里的自动驾驶,而不需要人工的接管。
王刚认为自动驾驶不仅能够创造社会价值,同时也是一个巨大的机遇,但自动驾驶是一个投入非常大、周期非常长的产业,纯粹的技术驱动或投资驱动,存在很大的风险,必须在早期就与商业和业务进行结合,产生商业的结果,从而驱动它的良性发展。
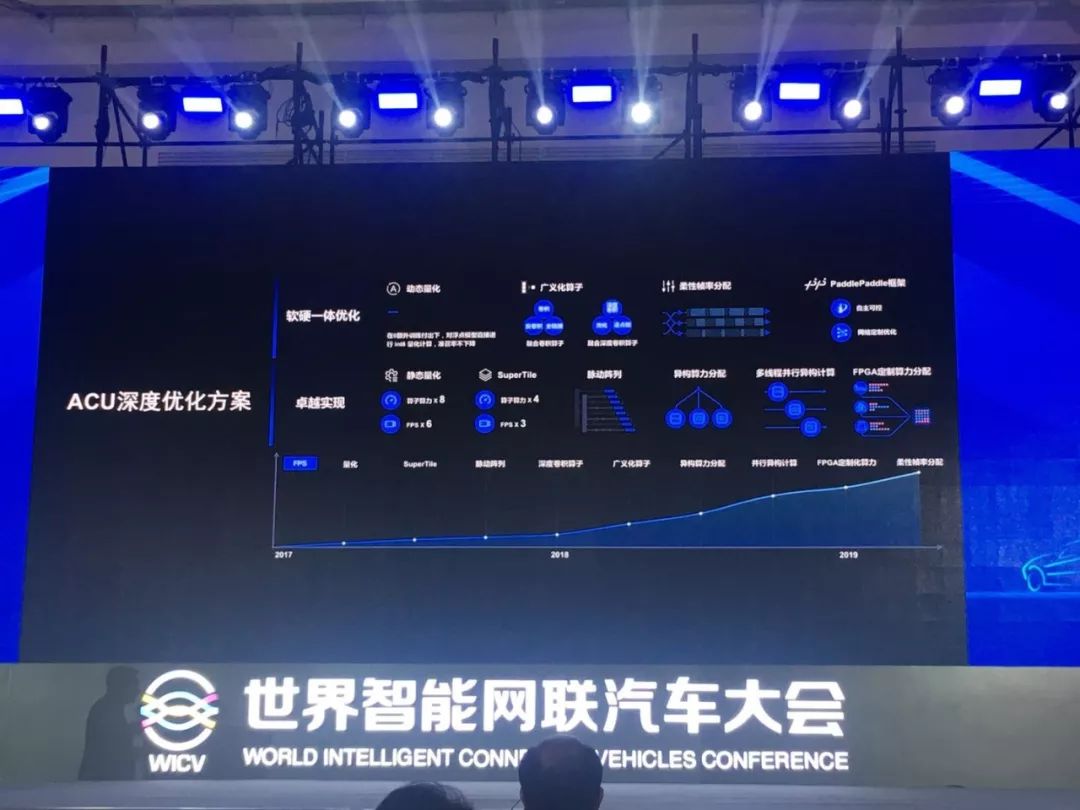
自动驾驶目前还面临着全方位的挑战,包括算法、计算硬件、传感器和基础设施等。多数情况下,自动驾驶无法量产落地的主要原因是自动驾驶的算法还不能够处理道路上的复杂交通状况。
怎么处理这样多样化的场景?王刚认为,可以应用人工智能里的经典理论——No Free Lunch理论。
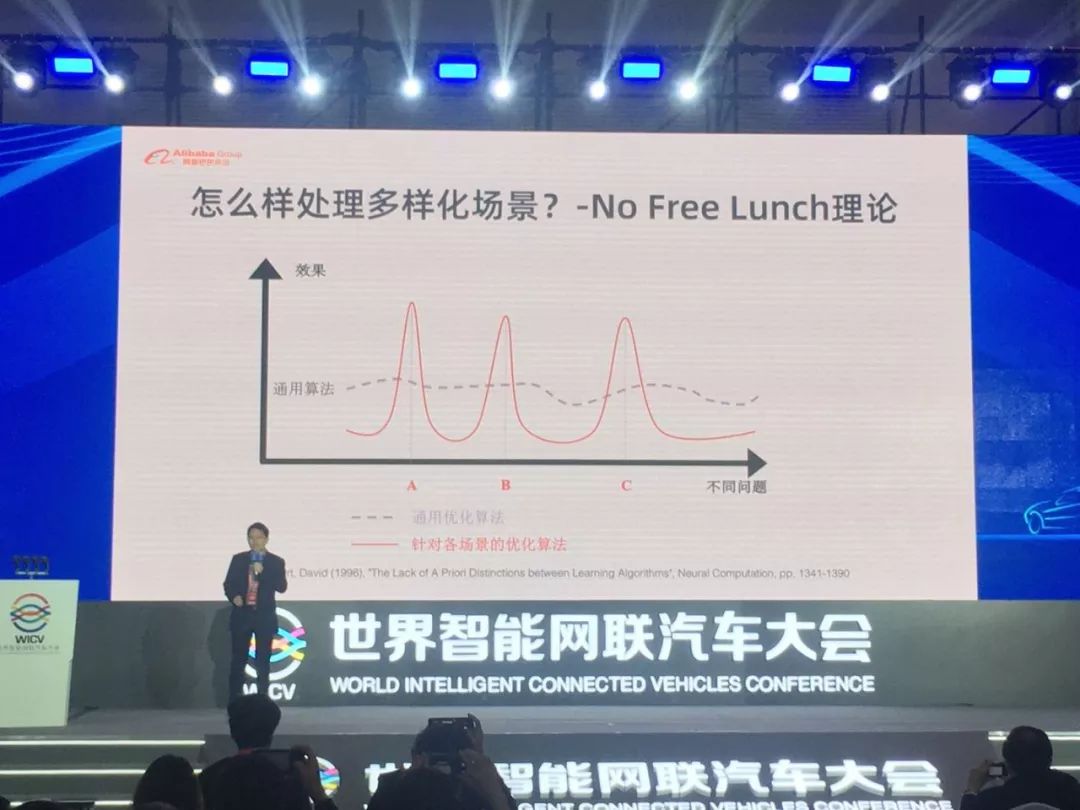
这个理论是指,假如用一种通用算法来解决所有问题,可能付出没有回报,不可能获得很好的结果。相反,如果针对每一个问题进行针对性的开发和优化,可能会取得更好的结果。
因此,阿里巴巴希望能够把自动驾驶的多场景问题进行分解、细化,有针对性的解决。不过,将交通场景进行分类看似简单,实际上非常复杂。王刚认为,一个好的分类方法,一是必须非常精细化,二是必须为算法服务。
基于此,阿里巴巴建立了自己的自动驾驶场景库,针对各种场景,联合感知和决策,有针对性地对场景类别进行开发。
不过,假如有1000个场景分类,就需要开发1000个不同的算法来解决问题。如果针对每个场景分类做相应的算法开发,这对每个自动驾驶团队来讲,都是一个非常巨大的灾难。
因此,阿里巴巴采用了计算换智能的开发模式,提出了AutoDrive平台,更多地采取数据驱动、计算驱动的方式,让计算机更聪明地找到适合每个场景的算法、参数、结构等,从而提高系统的智能程度。
为了让AutoDrive平台更好地运行,阿里将所有路测数据全部都放在了云上,因为只有云才有足够大的存储能力和和计算能力;阿里还建立了数据上传、标注、模型训练、仿真、评价的闭环,从信号输入到结构输出,都能在计算环境中实现。
阿里还做了自动驾驶数据中台。数据中台可以实现场景库的共享、所有数据的共享、系统工具的共享及技术的共享,让工程师能高效地开发他们的算法。
最后,王刚总结基于“No Free Lunch”理论的自动驾驶的研发需要依赖三个要素:场景精细化、算法针对性和云平台高效化,这三个要素进行协同,才能产生更好的化学反应。

点下「在看」,给文章盖个戳吧!?